 The anthropomorphic gripper was created as part of a Master’s thesis by group of three people (Tomasz Mańkowski, Jakub Tomczyński – current team members, and Grzegorz Sztylka), under supervision of Piotr Kaczmarek, PhD. The hand was designed as a five-finger gripper with geometry mimicking that of a human hand. The mechanism is underactuated, which means it has more degrees of freedom than controllable drives. This way, using mechanical synergies, control algorithms can be simplified, th
The anthropomorphic gripper was created as part of a Master’s thesis by group of three people (Tomasz Mańkowski, Jakub Tomczyński – current team members, and Grzegorz Sztylka), under supervision of Piotr Kaczmarek, PhD. The hand was designed as a five-finger gripper with geometry mimicking that of a human hand. The mechanism is underactuated, which means it has more degrees of freedom than controllable drives. This way, using mechanical synergies, control algorithms can be simplified, th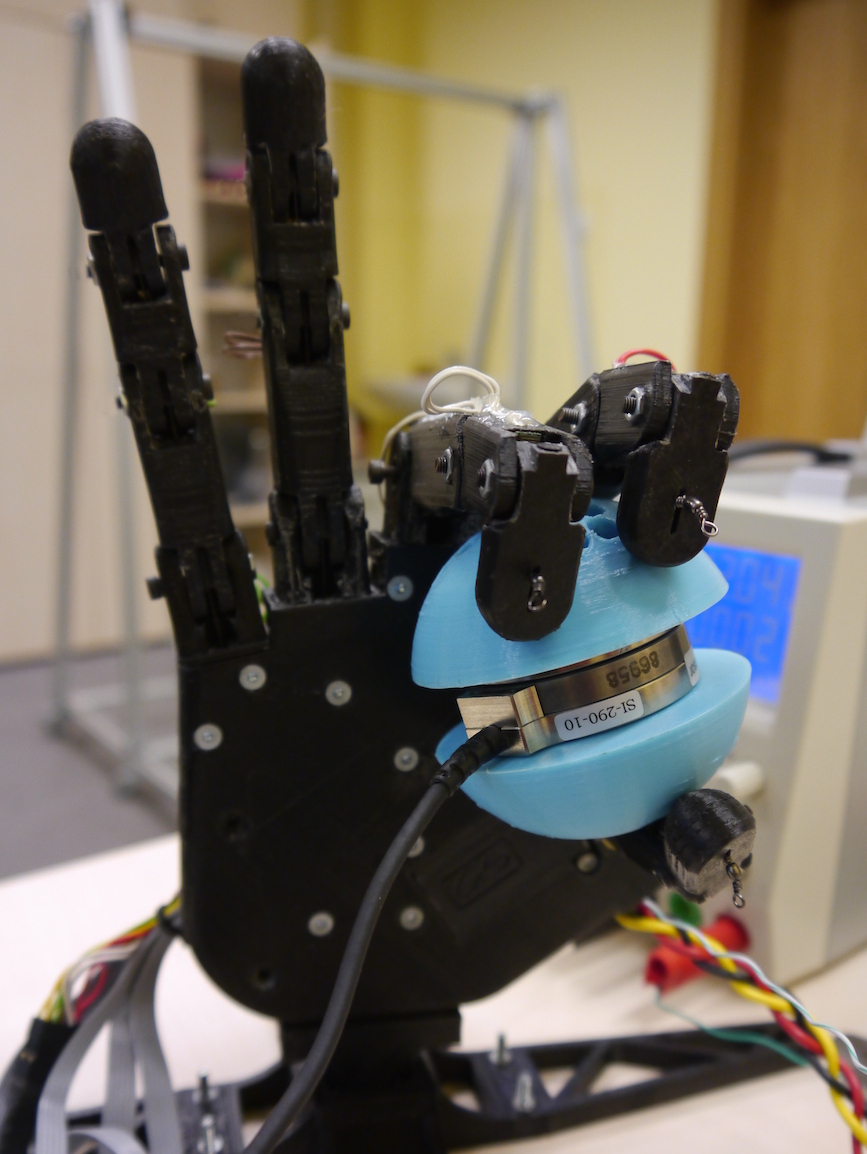 e fingers adapt to the shape of grasped objects and forces required for a firm grasp are smaller. The gripper is equipped with an opposable thumb. Most mechanical elements were 3D-printed, which makes the design cost-effective and easily modifiable.
e fingers adapt to the shape of grasped objects and forces required for a firm grasp are smaller. The gripper is equipped with an opposable thumb. Most mechanical elements were 3D-printed, which makes the design cost-effective and easily modifiable.
Finge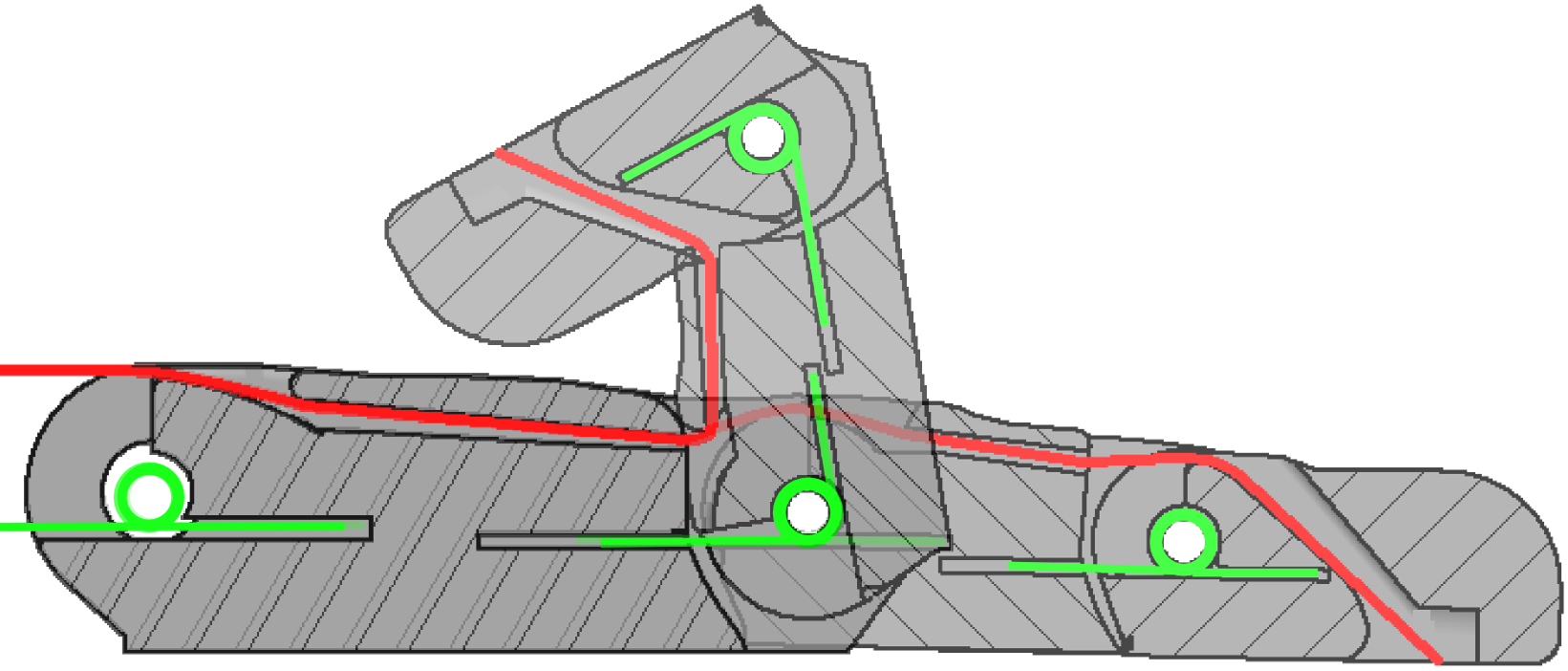 r flexion is implemented using four DC motors with gearboxes. Each finger is controlled by a single independent motor, with the exception of ring and pinky, which share the same drive for simplification purposes. Each motor drives a gearbox with a spool, which winds a wolfram tendon. The tendons are routed through the fingers, allowing for flexion and distributing flexion force across all joints. Fingers are extended with springs placed in each joint. The thumb has an additional worm drive for opposing.
r flexion is implemented using four DC motors with gearboxes. Each finger is controlled by a single independent motor, with the exception of ring and pinky, which share the same drive for simplification purposes. Each motor drives a gearbox with a spool, which winds a wolfram tendon. The tendons are routed through the fingers, allowing for flexion and distributing flexion force across all joints. Fingers are extended with springs placed in each joint. The thumb has an additional worm drive for opposing.
The drive control is done using a custom board w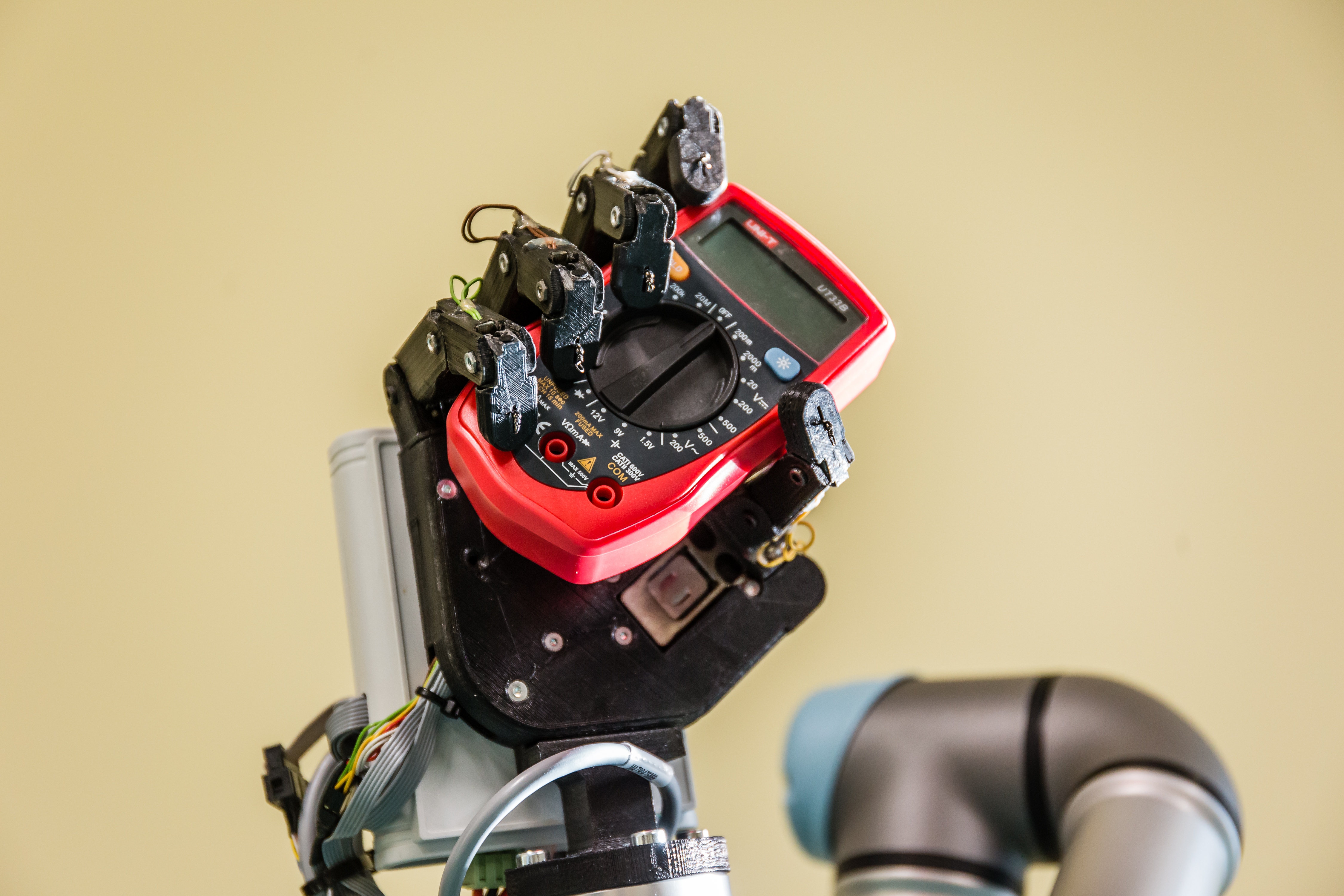 hich can receive commands from a PC via USB port or from a robotic arm. The controller reads current gripper state using incremental encoders in each drive is controlled from a PC via USB with a custom driver board. Each finger is also equipped with an end stop to detect extreme positions.
hich can receive commands from a PC via USB port or from a robotic arm. The controller reads current gripper state using incremental encoders in each drive is controlled from a PC via USB with a custom driver board. Each finger is also equipped with an end stop to detect extreme positions.