 https://dx.doi.org/10.3390/s19163548
https://dx.doi.org/10.3390/s19163548
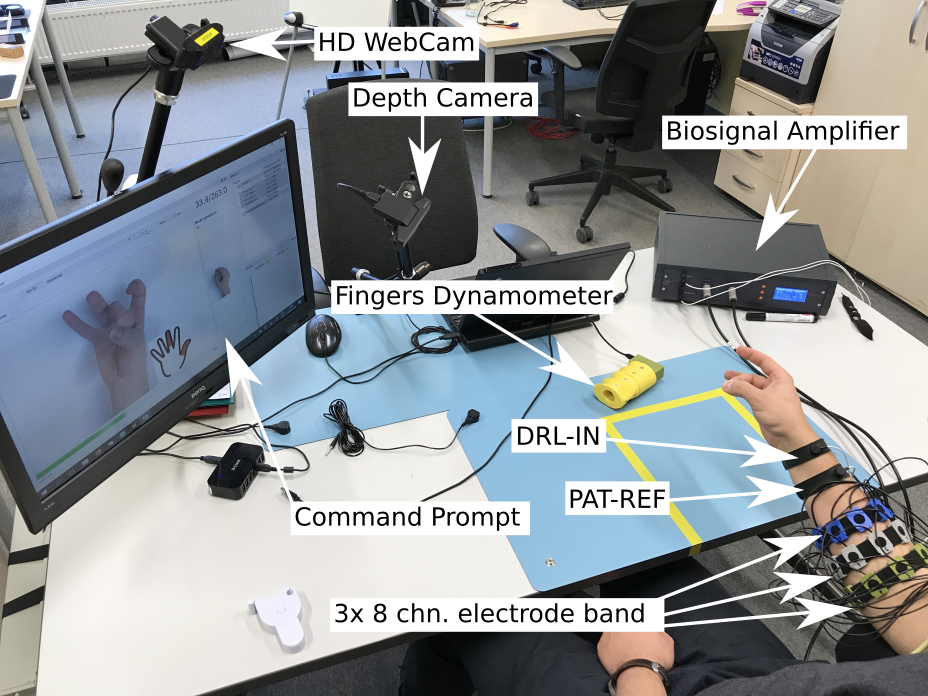
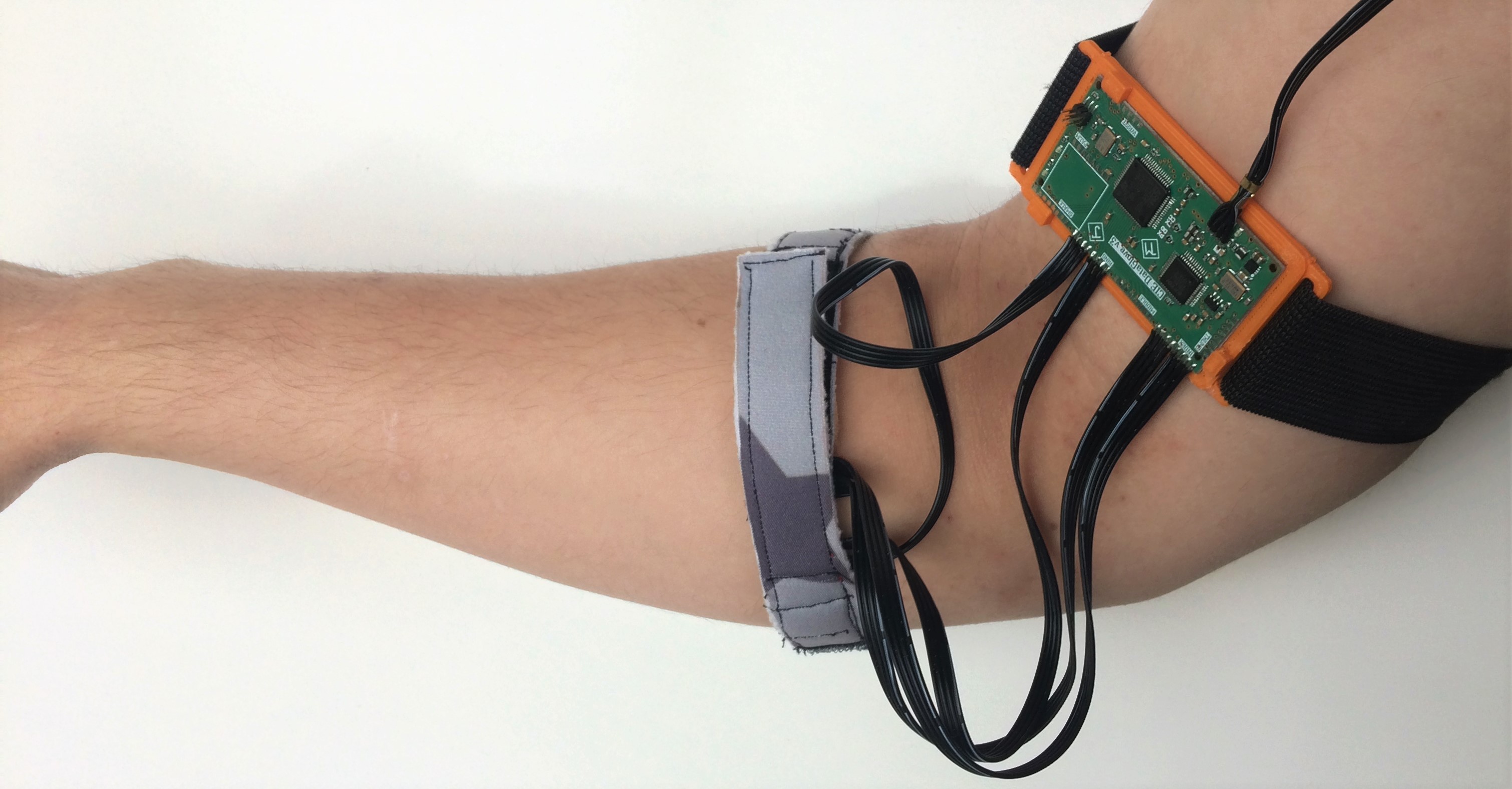
In this paper, we present a putEMG dataset intended for the evaluation of hand gesture recognition methods based on sEMG signal. The dataset was acquired for 44 able-bodied subjects and include 8 gestures (3 full hand gestures, 4 pinches and idle). It consists of uninterrupted recordings of 24 sEMG channels from the subject’s forearm, RGB video stream and depth camera images used for hand motion tracking. Moreover, exemplary processing scripts are also published. The putEMG dataset is available under a Creative Commons Attribution-NonCommercial 4.0 International (CC BY-NC 4.0). Continue reading putEMG—A Surface Electromyography Hand Gesture Recognition Dataset