 CIE-DataGlove is a glove-like apparatus intended for human hand posture capture. The essential design requirement was not to hinder hand movement and object manipulation, and not to introduce additional mechanical resistance to the fingers. The system is based on 12 9-DOF inertial measurement units placed on phalanges and metacarpus.
CIE-DataGlove is a glove-like apparatus intended for human hand posture capture. The essential design requirement was not to hinder hand movement and object manipulation, and not to introduce additional mechanical resistance to the fingers. The system is based on 12 9-DOF inertial measurement units placed on phalanges and metacarpus.
A thermo-active, antibacterial sports glove was chosen as a basis for the CIE-DataGlove, due to its fabric’s mechanical properties. The glove is made of polypropylene, polyamide, and elastane textile, which adheres to the user’s skin tightly, ensuring proper IMU orientation, while keeping the usage comfortable. Individual IMU sensors were placed inside 3D-printed housings with cable stress reliefs and sewn onto the glove on top of the phalanges.
CIE-DataGlove system can be divided into two main components: MainBoard, which serves as a hub and main data acquisition entity, and multiple sensor units – IMU Boards. The system in based on 9-DOF 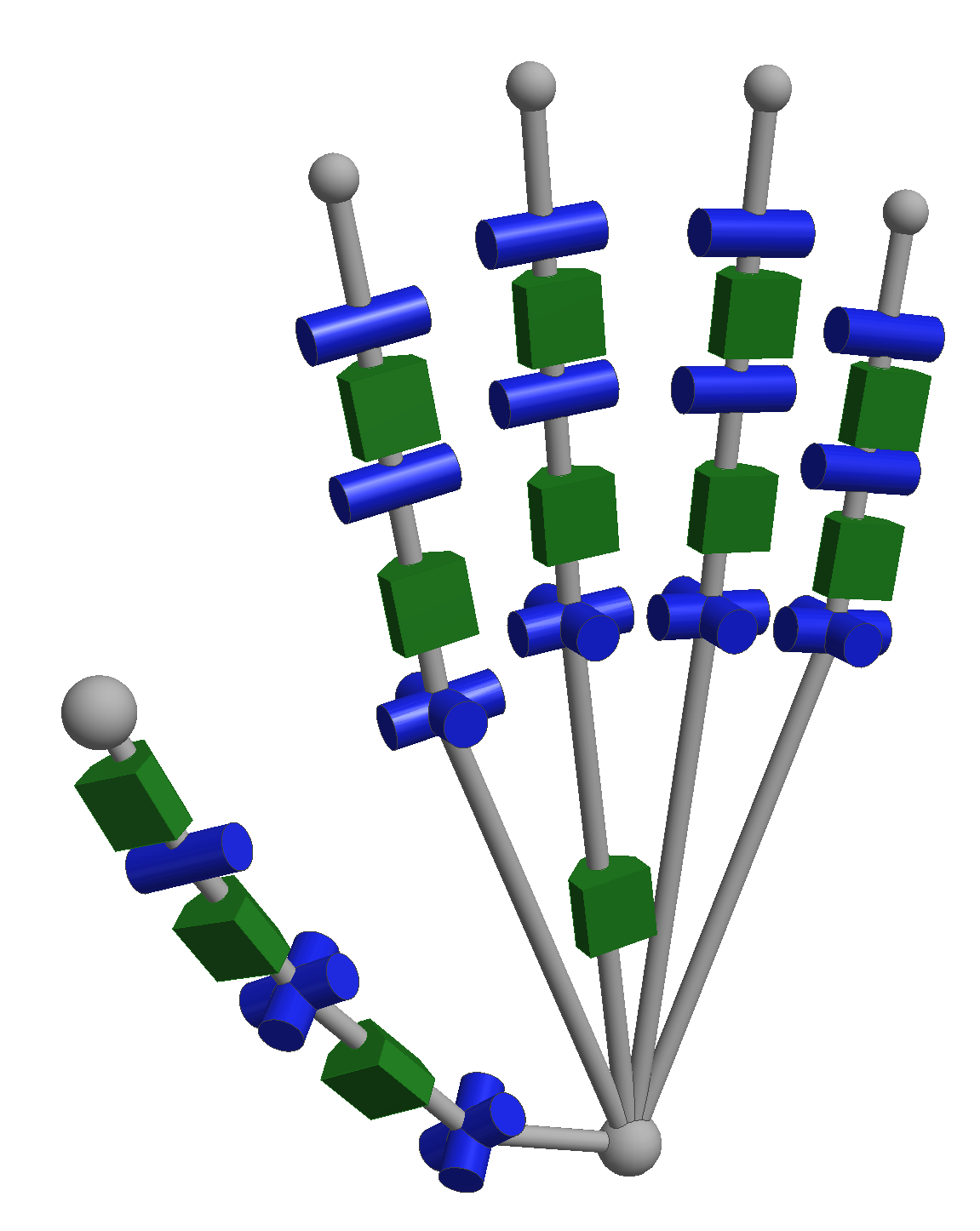 MARG sensors LSM9DS0 by STMicroeletronics. Each IMU Board hosts one, independent LSM9DS0 sensor. CIE-DataGlove system is controlled by STM32F405RG MCU. MainBoard is equipped with an additional LSM9DS0 sensor which serves as a metacarpus’ measurement unit.
MARG sensors LSM9DS0 by STMicroeletronics. Each IMU Board hosts one, independent LSM9DS0 sensor. CIE-DataGlove system is controlled by STM32F405RG MCU. MainBoard is equipped with an additional LSM9DS0 sensor which serves as a metacarpus’ measurement unit.
Our approach uses an EKF to estimate dynamic configuration of a kinematic chain partially mimicking a single finger – one rotational joint with two Degrees Of Freedom (DOF) (metacarpophalangeal joint), and one 1-DOF rotational joint (proximal interphalangeal joint). The model also estimates whole system rotation and acceleration with respect to world coordinates, allowing for joint estimation in situations where the hand moves and rotates without any geometric restrictions.