 CIE-DataGlove is a glove-like apparatus intended for human hand posture capture. The essential design requirement was not to hinder hand movement and object manipulation, and not to introduce additional mechanical resistance to the fingers. The system is based on 12 9-DOF inertial measurement units placed on phalanges and metacarpus.
CIE-DataGlove is a glove-like apparatus intended for human hand posture capture. The essential design requirement was not to hinder hand movement and object manipulation, and not to introduce additional mechanical resistance to the fingers. The system is based on 12 9-DOF inertial measurement units placed on phalanges and metacarpus.
Category: Hardware Development
CIE-Exoskeleton – lower limbs exoskeleton
 An exoskeleton designed for use by paraplegic users, aimed at restoring walking capabilities and aiding in rehabilitation process.
An exoskeleton designed for use by paraplegic users, aimed at restoring walking capabilities and aiding in rehabilitation process.
The exoskeleton is equipped with four actuated joints placed in hips and knees, which is a minimal set of actuators enabling paraplegic operators to walk, stand up and sit down with use of crutches. The exoskeleton dimensions adjustment and actuators power are sufficient to be successfully used by majority of population of weight up to 180 lbs.
CIE-Hand
 The anthropomorphic gripper was created as part of a Master’s thesis by group of three people (Tomasz Mańkowski, Jakub Tomczyński – current team members, and Grzegorz Sztylka), under supervision of Piotr Kaczmarek, PhD. The hand was designed as a five-finger gripper with geometry mimicking that of a human hand. The mechanism is underactuated, which means it has more degrees of freedom than controllable drives. This way, using mechanical synergies, control algorithms can be simplified, th
The anthropomorphic gripper was created as part of a Master’s thesis by group of three people (Tomasz Mańkowski, Jakub Tomczyński – current team members, and Grzegorz Sztylka), under supervision of Piotr Kaczmarek, PhD. The hand was designed as a five-finger gripper with geometry mimicking that of a human hand. The mechanism is underactuated, which means it has more degrees of freedom than controllable drives. This way, using mechanical synergies, control algorithms can be simplified, th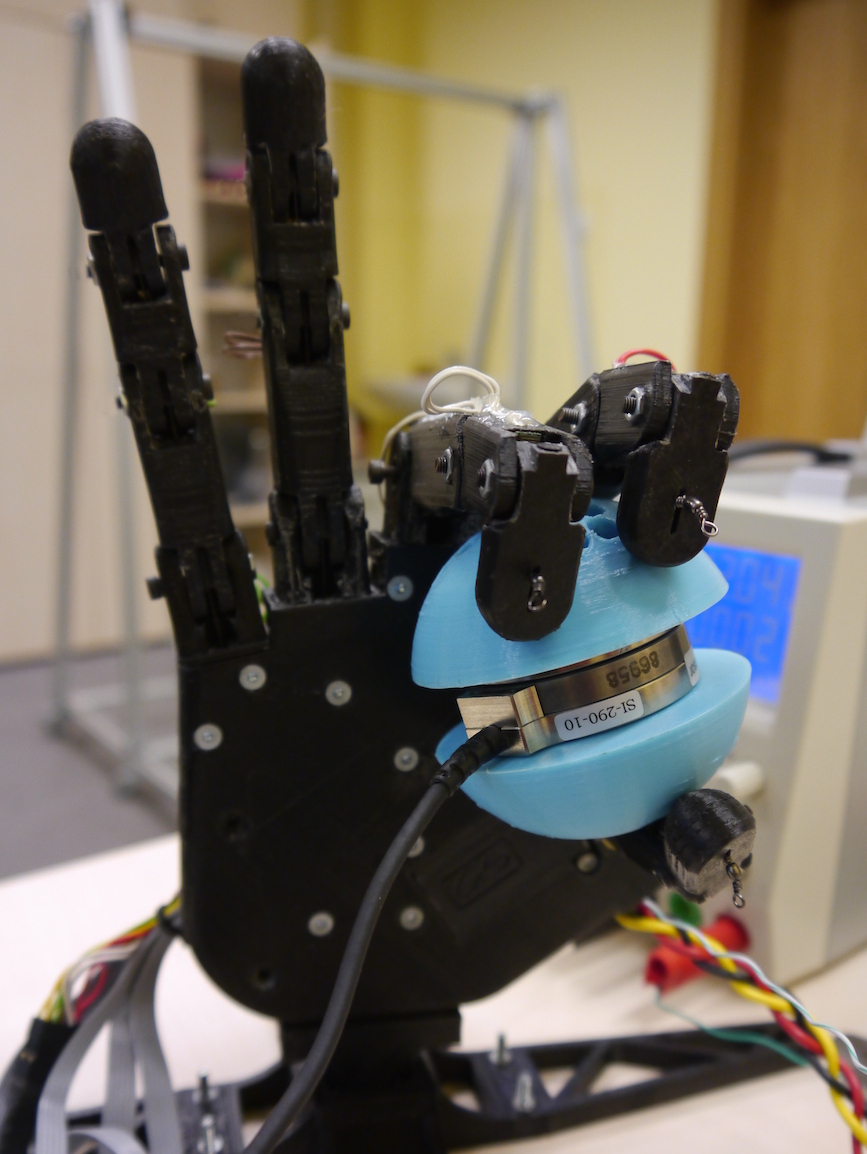 e fingers adapt to the shape of grasped objects and forces required for a firm grasp are smaller. The gripper is equipped with an opposable thumb. Most mechanical elements were 3D-printed, which makes the design cost-effective and easily modifiable.
e fingers adapt to the shape of grasped objects and forces required for a firm grasp are smaller. The gripper is equipped with an opposable thumb. Most mechanical elements were 3D-printed, which makes the design cost-effective and easily modifiable.
B-AND – Bio-Activated iNtention Detector
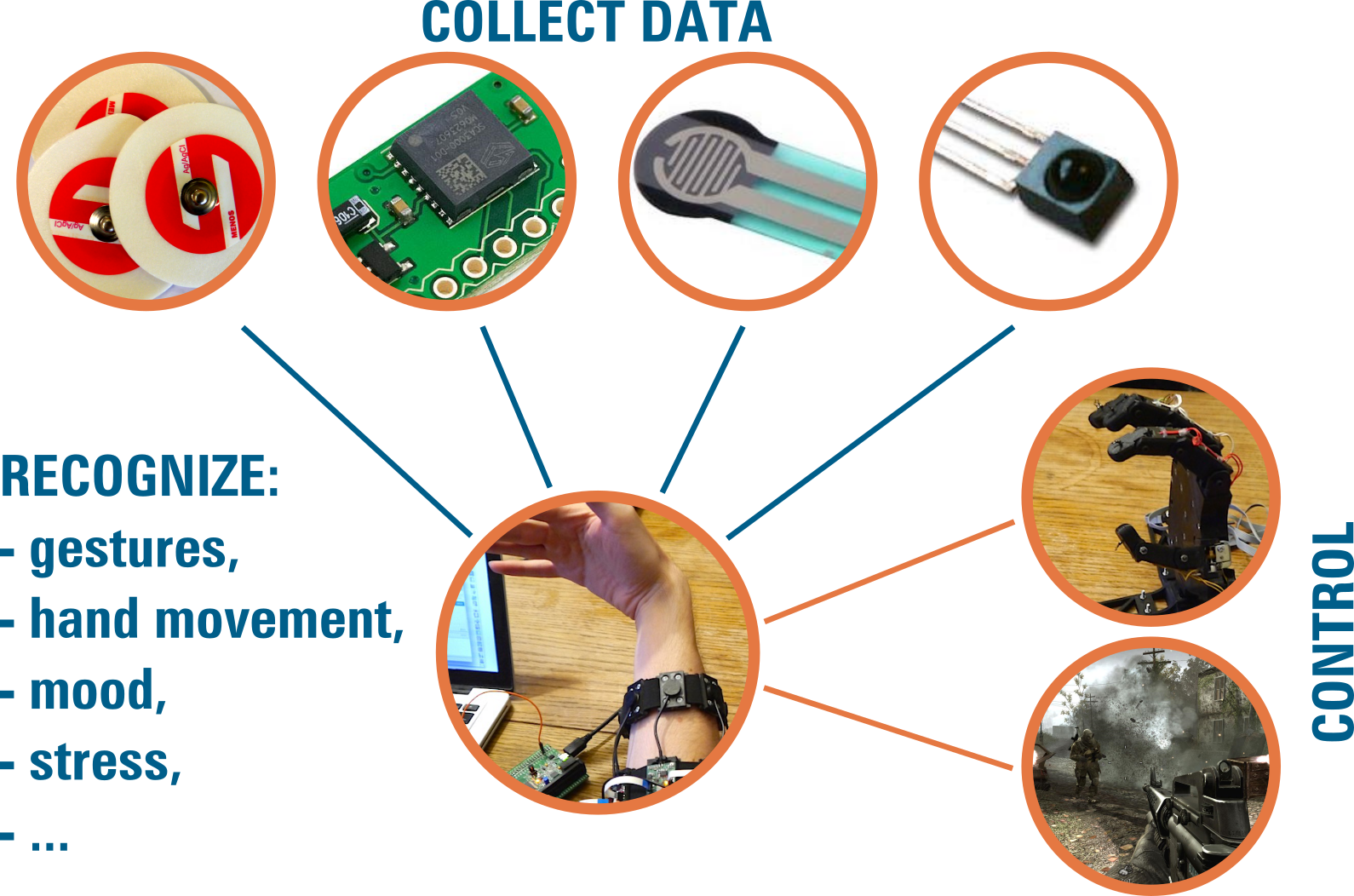
B-AND technology aims to provide comprehensive information about its user’s forearm activity, allowing fork new ways in human-machine interoperability. The key to this lies in applying sensor fusion combining arm motion interface, with extended biological signal information: EMG or skin deformation. Merging data from several sources allows for advanced hand and arm gesture recognition, with high reliability levels. Form of a forearm-placed band makes it easy and intuitive to use.